'쿼드콥터-완성/wii콥터'에 해당되는 글 3건
- 2010.07.21 Micro quad - wii copter 만들기 #2 schematic & 준비물
- 2010.07.21 Micro quad - wii copter 만들기 - 센서 샘플링에 대한 discuss
- 2010.07.21 micro qaud - wii copter 를 만들기 시작.#1
Micro quad - wii copter 만들기 #2 schematic & 준비물
쿼드콥터-완성/wii콥터 2010. 7. 21. 13:53
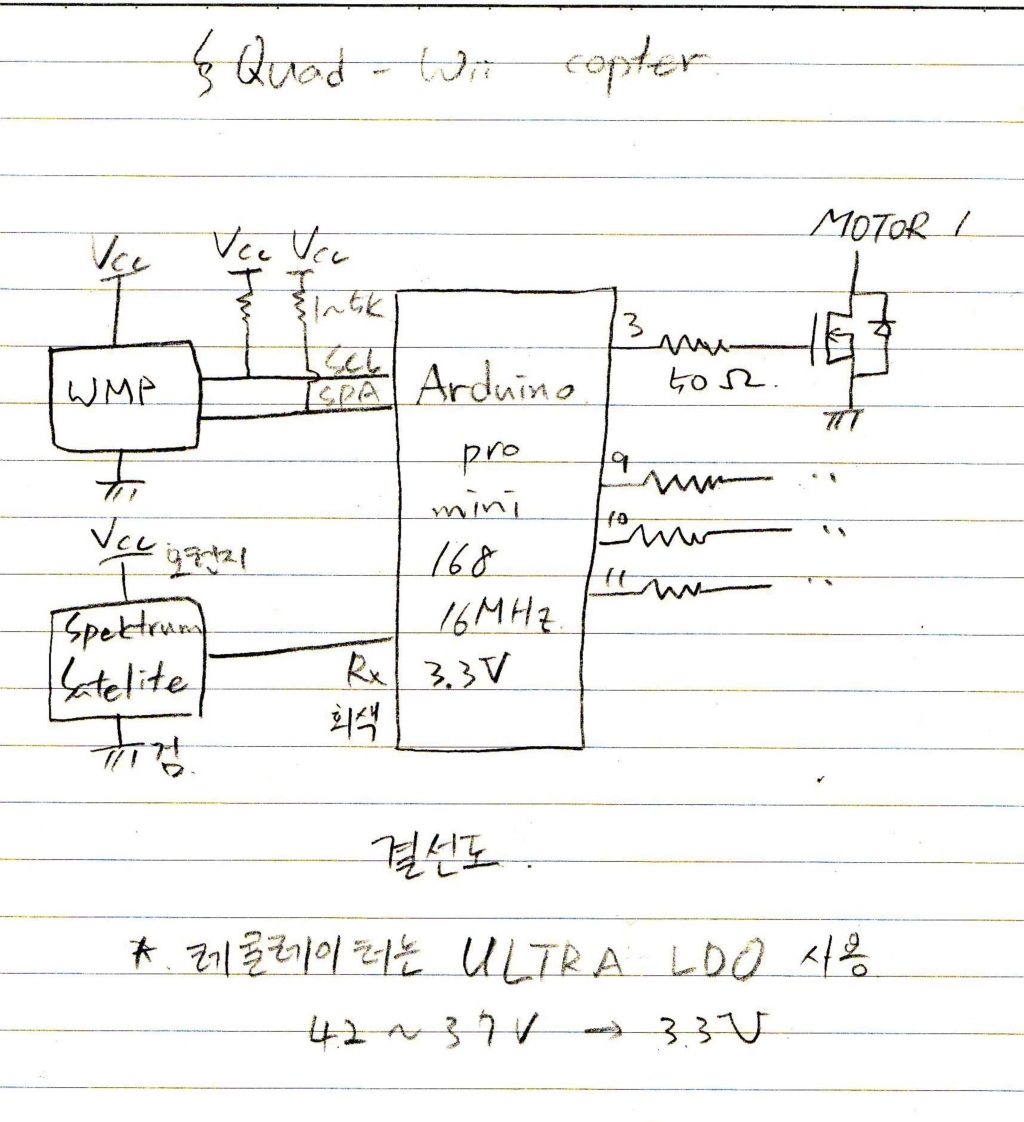
구상한 회로도이다.
필요한 준비물
아두이노 프로 미니 보드 - 19불 -> 23000원
만능 pcb(18 x 18) - 1000원
모션 위 플러스 - 15000원
리폴 1셀 138mA - 1.3불 - 1600원
기어드 브러쉬 모터(GPS-6) x4 - 18.2불 - 22000원
프롭 GWS4025 x 10 - 2.6불 - 3100원
스펙트럼 위성 수신기 - 36불 - 43200원
기타 코넥터 및 케이블 - 10불 - 12000원
도합 : 12만9백원(수신기를 재활용하면 77,700원)
기타 필요한 기자재
FTDI 케이블 - 15불 : 18000원
스펙트럼 조종기(dx7 이상) - 200불 - 24만원
Micro quad - wii copter 만들기 - 센서 샘플링에 대한 discuss
쿼드콥터-완성/wii콥터 2010. 7. 21. 13:43
두 가지 물음을 해보자.
2. 100Hz 의 주파수에 해당하는 PWM 으로 구동하는 모터의 경우에
100Hz 이상의 대역폭을 가진 센서는 무용지물인가?
첫번째 답은 틀렸다..가 확실하다. 최대한 높은 sps(sample per second) 의 adc로 샘플링 해주고 그 데이터를 50Hz LPF 로 변환하여 읽어준 값이 정확한 센서값이 될 것이다. 따라서 비록 자이로의 밴드폭이 60Hz 에 해당한다고 하더라도 sps 는 크면 클 수록 좋다.
두번째 답은, 맞다라고 생각하지만 정확하지는 않다. 센서값중 100hz 이상의 값은 무용지물임은 틀림 없다. 따라서 이때에도 최대한 높은 sps 를 가진 adc로 샘플링을 해주고 100Hz 의 LPF 를 처리해준 값으로 모터를 컨트롤하는게 타당하다고 본다.
micro qaud - wii copter 를 만들기 시작.#1
쿼드콥터-완성/wii콥터 2010. 7. 21. 12:27
동기
tri- wii copter 에 자극을 받아, micro quad-wii copter 를 만들기 시작했다.
전체 디자인.
1. ARDUINO PRO MINI 보드를 메인보드로 삼고, 가속도 센서는 사용하지 않으며,
-> WII MOTION PLUS 에 내장된 3축 자이로 센서를 쓰기로 결정(15천원)
비록 DELAY 가 있지만, TWI 인터페이스를 그대로 사용하기로 결정
2. 3개의 브러쉬리스 모터 + 1서보 모터 대신 -> 4개의 브러쉬 모터를 사용 (간단하게 구현
-> 이를 위하여 4개의 PWM 이 필요하나, ARDUINO 에서 제공하는 내장 함수 analogWrite() 펑션을 사용하기로 하였다.이를 위해서는 제약이 있는데 매뉴얼에 따르면 490Hz 정도 구동이며, 3,5,6,9,10,11 핀 중 하나를 써야한다.
3. 4개의 핀으로 조종기 신호를 받아들이는 대신, 스펙트럼 수신기의 위성 수신기를 사용하기로 함
-> 장점은 3.3V 구동이 가능하며 직렬 통신(115200bps) 를 사용하므로 빠른 통신이 가능
-> 경량화 가능하며 가지고 있는 수신기 활용할 수 있음
-> 이를 위해 MikroCopter 의 소스를 참조하기로 하였다.
4.전원은 리폴 1셀로 구현.
-> 스위치는 IRMLML2502 mosfet n-ch 으로 결정(Vgs 3.3V로 스위칭 가능한 장점, 3A, 20V)
-> 메인보드의 경우 atmega328P은 1.8~5.5V에서 ~20MHz 까지 지원
-> 위 모션 플러스의 경우에도 3.3V 구동 가능
-> 수신기의 전원 또한 3.3V
-> 이를 위하여 ultra LDO 가 필요하였다. SPX3819 로 결정(340mV dropout at full load)
리폴1셀의 전압을 4.2V ~ 3.7V 까지만 사용하기로 하였을 때에 3.3V 출력 가능
5. 모터는 하비시티에서 판매중인 Micro Power system w/ Gearbox GPS-6 으로 결정
thrust 가 16g 이므로 x4 => 64g.
조종을 위해 기체의 무게를 32g 이하로 맞춰야 한다.
(모터2g+프롭(-gws4025)1.3g) x4 = 13.2g
메인보드+wii motion plus = 6.8g
base plate + 수신기 = 15.2g
배터리 = 3.5g
기타 잡자재 = 5g
총 38.6g 으로 6.6g 오버하지만, 경량화 등으로 해결 가능해 보임





